処理水・廃炉に関する情報Information on treated water and decommissioning
(2023年 更新)
Qトリチウムとはどのようなものですか。
Aトリチウムは三重水素と呼ばれる水素の仲間(同位体)です。半減期は12年程度で、弱い放射線を放出します。
「水素」の仲間で、中性子の数が2つ多いもの――それがトリチウム(三重水素)です。弱い放射線を放出し、放射線を出さない安定なヘリウム3に変わります。トリチウムの半減期は約12年です。
トリチウムの多くは他の水素と同じように酸素と結びつき、「水」のかたちで存在します。水の分子は、2つの水素原子と1つの酸素原子でできたものです。トリチウムは、水素原子の代わりとなって、水分子の一部となり、水と同じように振舞います。
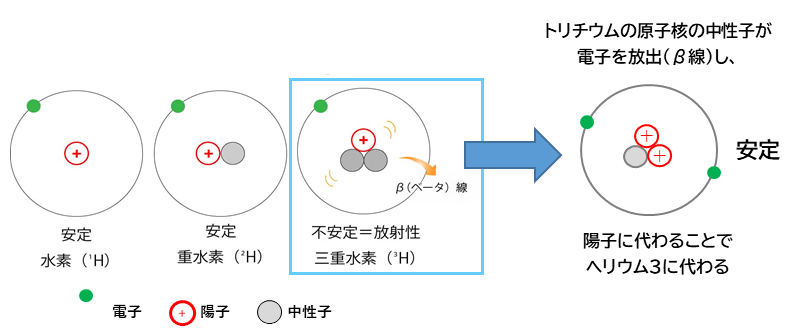
図1 水素の同位体トリチウム
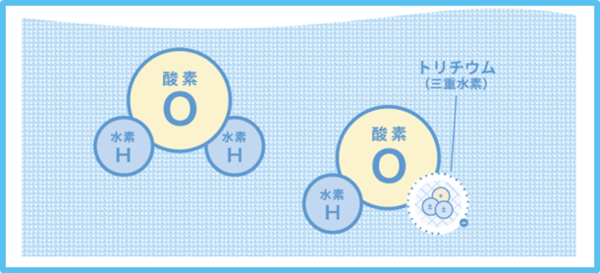
図2 水分子のイメージ
(出典:経済産業省 広報資料)
 #6 処理水・廃炉に関する情報
#6 処理水・廃炉に関する情報 Q トリチウムが人体へ与える影響はありますか。
Q トリチウムが人体へ与える影響はありますか。