処理水・廃炉に関する情報Information on treated water and decommissioning
(2021年)
Q放射線は可視化できますか。福島第一原子力発電所建屋内部の汚染状況を把握する方法はありますか。
A福島第一原子力発電所では多くの機器やガレキが汚染しており、それらの汚染分布を正確に把握するためには汚染箇所を3次元的に特定する必要がありました。しかしサーベイメータやガンマカメラ※1を用いた従来手法は点や面での測定であり、3次元的な汚染分布の把握は困難でした。
原子力機構は、こうした現場のニーズを踏まえ、放射性物質を可視化するコンプトンカメラ※1に、サーベイメータおよびレーザ光を利用した3次元空間認識デバイスを組み合わせることにより、汚染箇所や空間線量率を見える化した3次元マップを描画するシステム(iRIS)を開発しました。
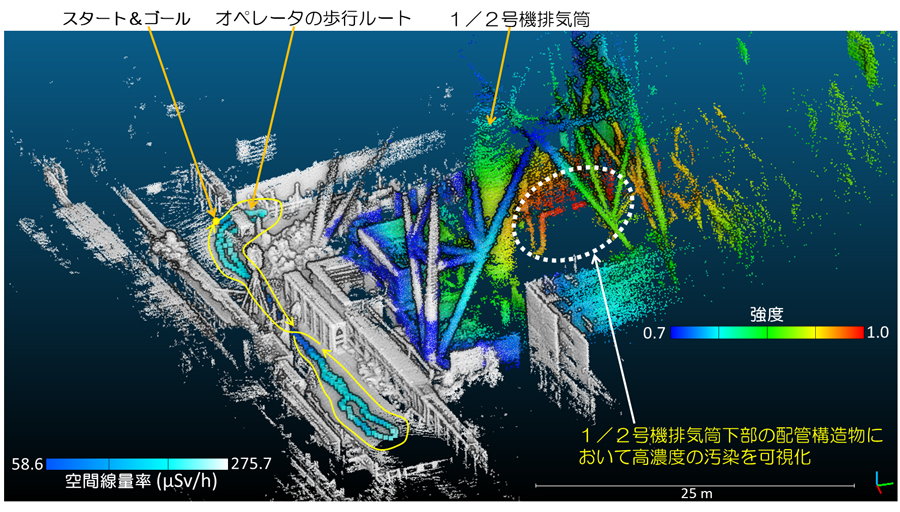
図1 福島第一原子力発電所 1/2号機排気筒付近における空間線量率と高濃度汚染箇所を可視化した3次元マップ
オペレータの歩行ルート上の線量率と、コンプトンカメラで可視化した高濃度汚染箇所をカラー表示しました。
福島第一原子力発電所サイト内には多くの機器やガレキ、建屋といった様々なものが存在しています。これらに放射性物質が付着しているため、汚染は3次元的に広がっています。そのような環境では放射線がいたるところを飛び交っているため、従来のサーベイメータのように“その点”での線量率を測定するだけでは正確な汚染の分布が把握できないという問題がありました。さらにサーベイメータを用いた点での測定では、作業現場全体の3次元測定に時間がかかるだけでなく、作業員が被ばくしてしまうという問題もありました。
原子力機構ではこのような課題を解決するために、放射性物質可視化カメラであるコンプトンカメラと3次元測域センサ(以下、「3D-LiDAR」※2)および線量率を計測するサーベイメータを組み合わせた統合型放射線イメージングシステム「iRIS」を開発しました。
静止測定にて2次元的な汚染分布を得る従来のコンプトンカメラの利用方法と異なり、オペレータが測定対象箇所の周辺を高濃度汚染箇所に近づくことなく歩行移動しながら短時間で計測することで汚染箇所の3次元マップの描画を可能としました。本手法を福島第一原子力発電所の1/2号機排気筒下部付近に適用した結果、高濃度汚染箇所を可視化した3次元マップの描画に成功しました(図1、図2)。また、このマップ上にはオペレータの歩行ルート上の空間線量率を併せて表示しました。この3次元マップはパソコンやタブレットを用いて任意の視点から観察することができ、ホットスポットが存在する福島第一原子力発電所廃炉現場をあらゆる方向から俯瞰的に観察できます。さらに、市販の仮想現実(VR)ゴーグルを用いることにより、仮想空間に再現した廃炉環境を汚染分布とともに体感することが可能となり、作業者の事前トレーニングにも活用できます。
また、本システムをロボットに搭載することにより、作業者の入域が困難な原子炉建屋のような高線量率エリア内部の3次元汚染分布マップを容易に取得することが可能となります。このマップは作業員の被ばく線量の低減や、除染計画の立案に役立つことが期待されます。

図2 1/2号機排気筒下部の様子
実証試験では高線量率環境である排気筒下部には進入せずに、装置を排気筒下部に向けながら歩行測定することにより、汚染分布を表示した3次元マップを描画できました(図1参照)。
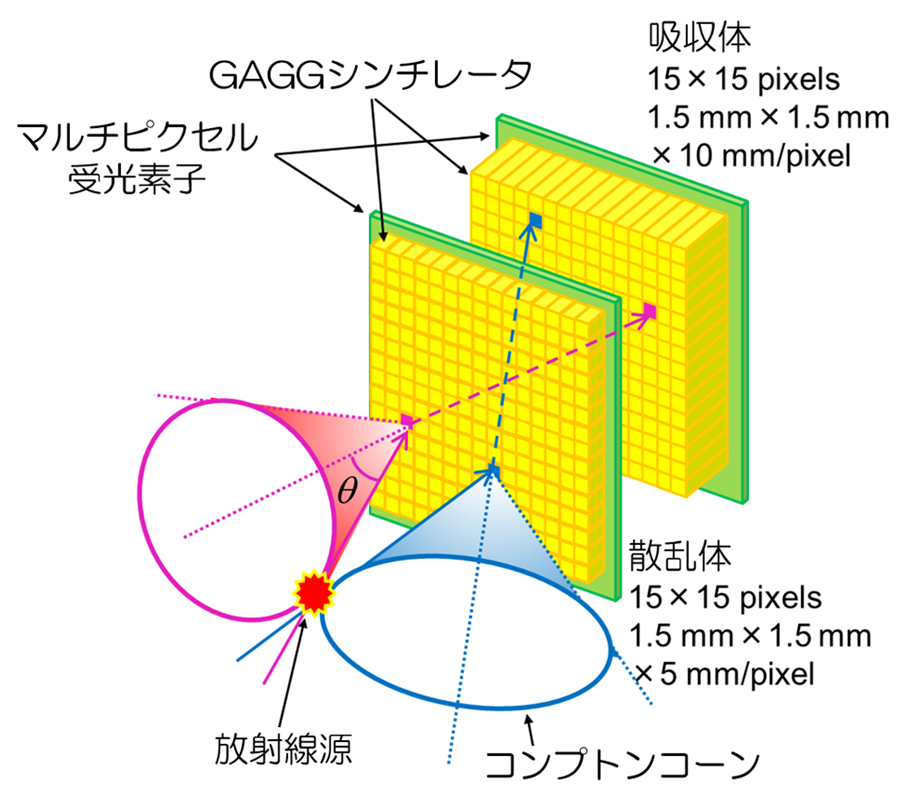
図3 コンプトンカメラの模式図
コンプトンコーンと呼ばれる仮想的なコーンをカメラ前方に描画し、コーンの交点に放射性物質を可視化します。
iRISでは図4に示す3つのキーデバイス、すなわち、3D-LiDAR、コンプトンカメラおよびサーベイメータを組み合わせました。iRISでは以下のことを行っています。
- 3D-LiDARを用いた自己位置推定と環境地図作成の同時実行(SLAM)※6により廃炉現場の3次元モデルを構築するとともに、移動中のシステムの自己位置および姿勢の情報を逐一記録
- これらの情報を、コンプトンカメラを用いて各位置で取得した放射線飛来方向の情報に同期
→ 移動しながら取得したデータによる3次元的な汚染の可視化がはじめて実現可能に - サーベイメータを用いることで、歩行ルート上の線量率を逐一記録可能
- 1~3のような複数のセンサ情報を入力ファイルとし、数回のボタン操作で3次元汚染マップを描画できる専用ソフトウェア(COMRIS)を新たに開発
このソフトウェアを用いることにより、図1に示すように線量率、高濃度汚染箇所をカラーコンター図※7でPC上の仮想空間に表示できるようになりました。

図4 3D-LiDAR(左上)、コンプトンカメラ(上中央)およびサーベイメータ(右上)の組み合わせからなる統合型放射線イメージングシステム(iRIS)
コンプトンカメラで撮影する汚染分布とサーベイメータで計測する移動ルート上の線量率を、測域センサで取得する作業環境の3次元マップ上に投影します。
実証試験は、令和2年11月に東京電力ホールディングス株式会社(以下「東京電力」)の協力により、福島第一原子力発電所サイト内 1/2 号機の排気筒付近で実施しました。当該排気筒の下部は線量率が高く、作業者の長時間の滞在が難しいエリアでした。コンプトンカメラを用いた従来の定点測定では、複数点から対象を測定せねばならず、コンプトンカメラの設置や移動、測定を繰り返す必要がありました。しかし本システムを用いた測定では、排気筒下部に進入することなく比較的線量率の低い通路上を歩行することにより、遠隔にて、わずか5分未満で完了しました。この測定データをもとに、図1に示す高濃度汚染箇所を可視化した3次元マップを描画することに成功しました。図1は排気筒付近の3次元モデルに、汚染の主な原因である放射性セシウムの分布イメージを赤く投影することによって描画した3次元汚染マップです。これは移動しながらの連続測定によって、福島第一原子力発電所に存在する高濃度汚染箇所に近づくことなく “見える化”したはじめての結果です。
今後、本システムをロボットに搭載することによって福島第一原子力発電所原子炉建屋内部のより深部の放射線分布の探索を進めていきたいと考えています。本システムを用いることにより、測定のたびにロボットを停止させる必要がなく、短時間で広範囲の汚染箇所や線量率データを収集することができるようになります。また、仮想空間に福島第一原子力発電所作業現場を汚染分布とともに再現することで、遮へい設置方法や除染による空間線量率低減の効果を、事前にシミュレーションするといった発展が見込まれます。
【用語解説】
※1 ガンマカメラとコンプトンカメラ
ガンマカメラには、大別して下記の「ピンホールカメラ」と「コンプトンカメラ」があります。各々の特徴は以下のとおりです。
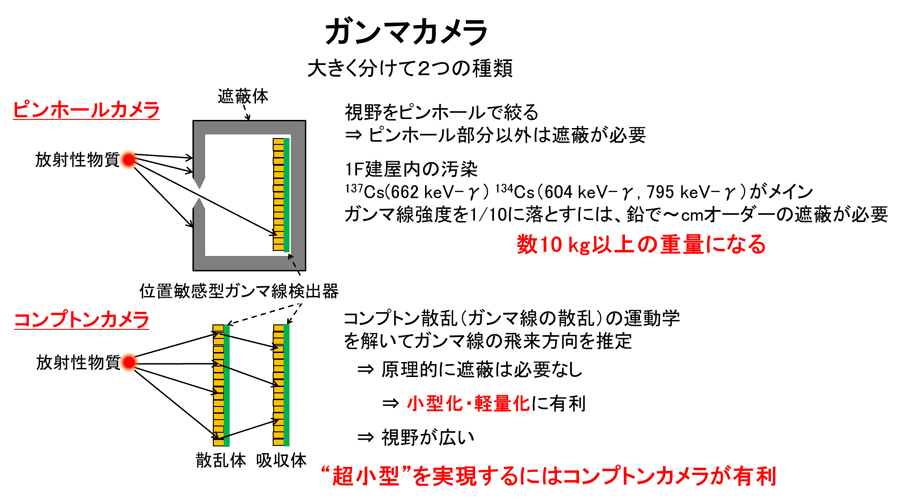
ピンホールカメラは簡便ですが、大型、高重量となり、狭い現場での測定には向いていません。コンプトンカメラは、入射したガンマ線(放射線の一種)が散乱体と吸収体の各々で相互作用した位置と、受け取ったエネルギーから、ガンマ線の飛来方向を特定します。解析的に放射線源を求める手法を採用しているため、高重量の遮蔽体が要らず小型化が可能ですが、技術的には高度なものです。
※2 3D-LiDAR
3D Light Detection and Rangingの略語であり、パルス状に発光するレーザ光を用いて対象物を走査し、反射した散乱光が戻ってくるまでの時間から距離を計測するセンサです。実証試験では、本装置を用いて作業環境の3次元モデルを取得しました。
※3 シンチレータ
放射線によって発光(シンチレーション光)する蛍光物質。シンチレーション光を電気信号に変換して、入射放射線数、エネルギーを計測します。
※4 GAGGシンチレータ
シンチレータ結晶のひとつ。組成は、ガドリニウム、アルミニウム、ガリウム、ガーネットです。GAGGは従来のシンチレータ結晶(NaI、CsI)に比べ密度が高いため、小さな結晶でも高感度の放射線測定が可能です。また、潮解性もなく空気中の水分による劣化の心配もないため、長期間安定して使用することができます。
※5 散乱体・吸収体におけるコンプトン散乱とエネルギー付与
コンプトン散乱は光子(ガンマ線)が物質中の原子に束縛された電子と相互作用して、エネルギーの一部を失う過程です。失われたエネルギーは電子に与えられ、この電子が散乱体もしくは吸収体の中を走行することによってエネルギーが付与されます。
※6 自己位置推定と環境地図作成の同時実行(SLAM)
自己位置推定と環境地図作成を同時に実施する技術であり、Simultaneous Localization and Mappingの頭文字をとってSLAMと標記されます。カメラやレーザースキャナ等を用いることにより、システムの自己位置や、障害物などの周辺環境の情報を同時に認識するものです。掃除ロボットや自動車の自動運転技術にも応用されている技術です。
※7 コンター図
図面上で、ある量の値が同じであるような点を結んだ線のこと。一定値ごとに等値線を描いた図面を等値線図(とうちせんず)とよび、属性・分布状況が感覚的にわかるようになっています。等値線図を見やすくするため、各等値線の間の帯ごとに段階的に色彩を施すことも多いです(カラーコンター図)。
 Q 廃炉に関する情報はどこで知ることができますか。
Q 廃炉に関する情報はどこで知ることができますか。 Q セシウムボールとは何ですか。
Q セシウムボールとは何ですか。